AR-GCN 阅读笔记
论文:Point Cloud Super Resolution with Adversarial Residual Graph Networks
方法
AR-GCN 方法概述
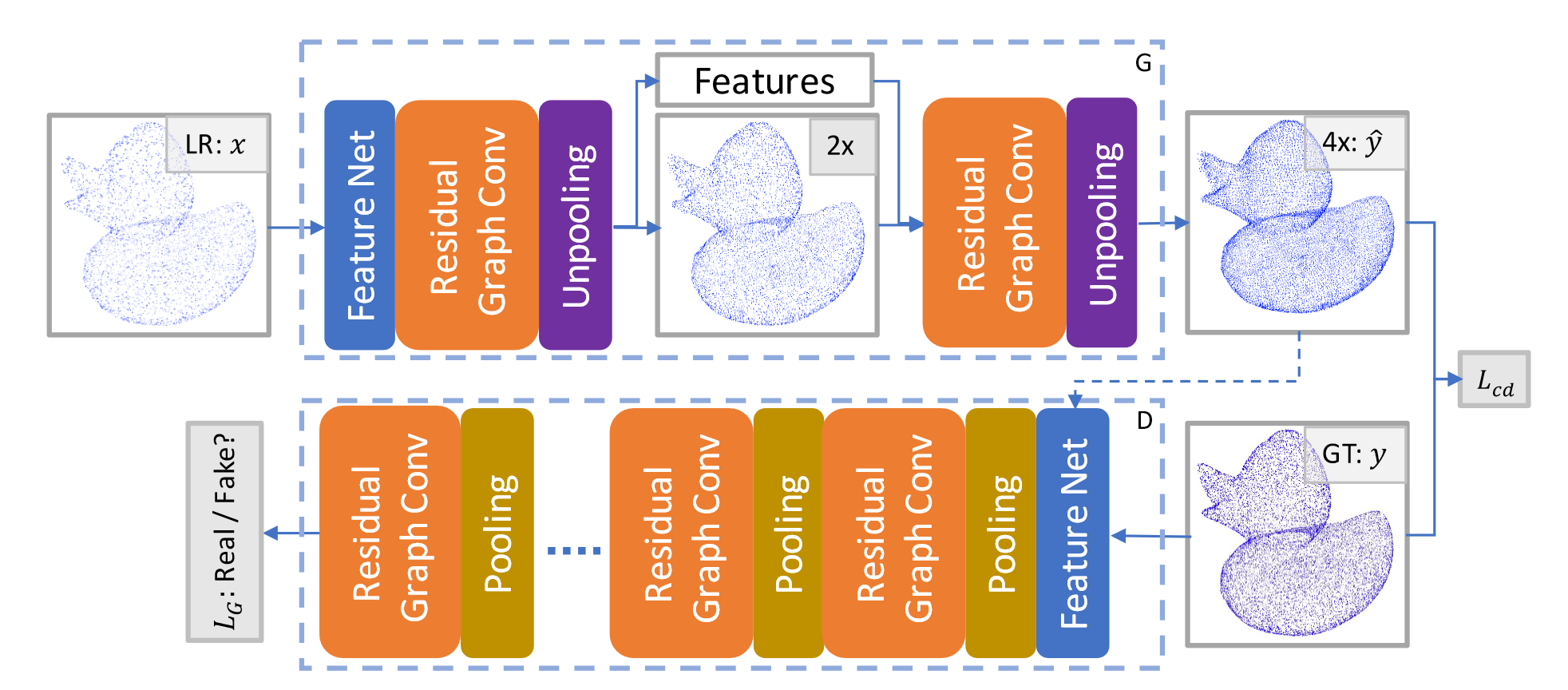
AR-GCN 由两个网络组成,生成器 \(G\) 和鉴别器 \(D\) 。其中 \(G\) 通过逐步上采样输入的 LR 来生成 HR 点云,而 \(D\) 负责辨别 HR 点云是真还是假。
论文提出了一个联合损失函数: \[ L(x,y)=\lambda L_{cd}(G(x),y)+L_G(G(x)) \] 其中 \(\lambda\) 控制损失函数 \(L_{cd}\) 和 \(L_G\) 的权重比。\(L_{cd}\) 度量了 \(y\) 和 \(\hat{y}\) 之间的距离,类似于图像超分辨率中的 \(L_2\) 损失: \[ L_{cd}(\hat{y},y)=\sum_{p\in y}min_{q\in\hat{y}}\|p-q\|_2^2 \] \(L_{cd}\) 是 CD 距离的变体。原始倒角距离由两部分组成:\(L_{cd}\) 和 \(\hat{L}_{cd}\) ,两者形式上对称。但 \(\hat{L}_{cd}\) 会促使预测点云 \(\hat{y}\) 与输入相同,导致点云出现重复点(后续可以实验证明一下)。因此论文删去了 \(\hat{L}_{cd}\) 。
\(L_G\) 损失则借鉴了 LSGAN(最小二乘生成对抗网络),被称作图对抗损失。LSGAN 主要工作是将 GAN 中的交叉熵损失函数替换为了最小二乘损失函数,克服了原始 GAN 生成结果不稳定、图像质量差的问题。具体有关 GAN 网络的原理及改进,在我另一篇笔记中有详细说明。以此有生成器和鉴别器的训练指标: \[ \begin{aligned} L_G(\hat{y})&=\left\|1-D(\hat{y}) \right\|^2_2 \\ L_D(\hat{y},y)&=\frac{1}{2}\|D(\hat{y}) \|^2_2+\frac{1}{2}\|1-D(y) \|^2_2 \end{aligned} \] 简单来说,AR-GCN 使用了生成对抗网络,生成器和鉴别器的损失函数借鉴了 LSGAN 的定义方法;此外,问题的本质仍然是上采样问题,因此加入点云间的相似性度量,指导生成器的训练。论文通过设计新的联合损失函数,将 GAN 和点云上采样结合了起来。
残差图卷积生成器
首先来看生成器的组成。生成器的目标是将点云上采样,包含了残差图卷积块、反池化块以及特征网络。
残差图卷积块
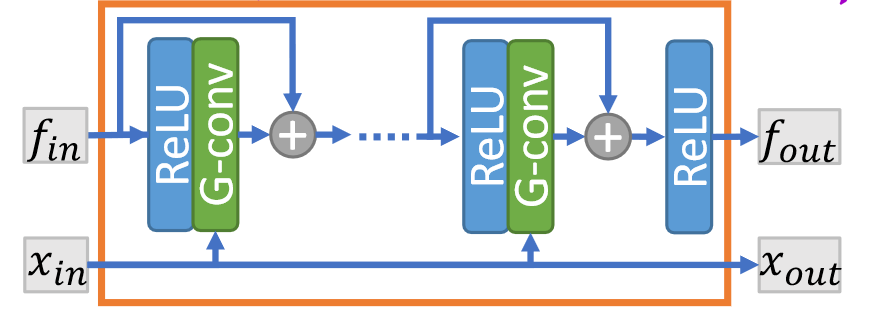
作者认为 PointNet++ 对中心点邻近点一视同仁,而图卷积的性能更加优异。观察上图,对于输入的特征 \(f_{in}\) 和输入点云 \(x_{in}\) ,通过 \(x_{in}\) 在每次卷积时查询近邻点 \(N(p)\) ,则每一层卷积的运算为: \[ f_{i+1}^p = w_0 f_l^p + w_1\sum_{q\in N(p)}f_l^q,\forall p\in v \] 其中 \(w_0,w_1\) 是可学习的参数,\(x_{in}\) 和 \(x_{out}\) 没有区别。同时注意到块中引入了残差连接来提升性能。思路和 DGCNN 很类似,但 DGCNN 更关注边特征,而这里以点特征为主体。同时 DGCNN 的图是动态更新的,也是一点不同。
反池化块
反池化的目的是增加点的数目。它首先通过残差图卷积块中的 G-Conv 层,将特征转换为 \(\hat{n}\times 6\) 的张量,然后重塑为 \(\hat{n}\times2\times3\) ,记作 \(\delta x\) ,然后将原始点坐标复制一份,加到坐标残差上。反池化块的宗旨是预测输入点和输出点之间的残差,比直接预测点坐标更快,这在 EC-Net 中就有阐述。
反池化块仅仅重塑了坐标,但破坏了特征。因此论文依然利用残差图卷积块所得到的特征,进行插值得到新点云 \(x_{out}\) 中每点的特征: \[ f_{out}^p = \frac{1}{k}\sum_{q\in N[x_{in}](p)}f_{in}^q,\forall p\in x_{out} \] 可以看到,此处对最近邻搜索 \(N(p)\) 标注了搜索集合为 \(x_{in}\) ,但计算的点坐标是来自 \(x_{out}\) 的。个人觉得,如果把预测的残差和原始特征放进一个图卷积来预测新的特征,或许会更好一些,这里相当于直接用了平均池化层。
特征网络
在进入残差图卷积块之前,需要提取点特征。论文采用了简单的 PointNet 结构,对每个点获取最近邻点,得到张量 \(k\times 3\) ,然后通过一系列逐点卷积加上一个最大池化层,转换为 \(1\times c\) 的特征 \(f^p\) 。
渐进式上采样
另外,论文采用了两次 \(2\times\) 的上采样,并在实验中发现这样做的精度更好。
图判别器
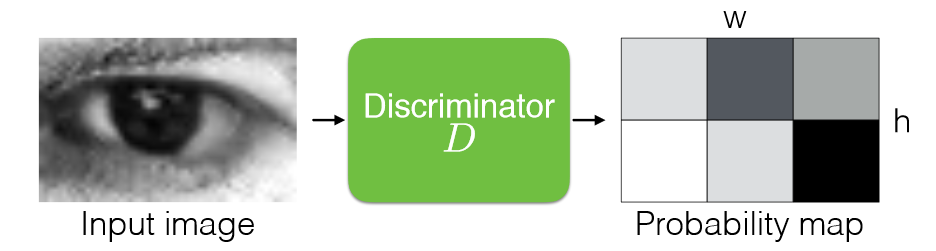
图判别器的结构依然基于残差图卷积块和特征网络,事实上,从第一张图可以看出,判别器和生成器唯一的区别就是用池化层替代了反池化层,最终输出一个标量预测。池化层的运算方法很简单,首先将点进行最远点采样,然后计算剩余点的特征为周围近邻点特征的池化: \[ f_{out}^p =\max_{q\in N[x_{in}](p)}f_{in}^q,\forall p\in x_{out} \] 特别的是,论文没有采用逐步下采样至单个标量的方式,因为这样做会导致伪像(我的理解是一些细微的噪声很难被整体鉴别器察觉,导致生成的数据上有伪影)。因此在这里鉴别器的输出包含不止 1 个点,并对每个点的局部 patch 进行鉴别,通过交叉熵来计算最终的总损失值。这里实际上是借鉴了另一篇文章:Learning from Simulated and Unsupervised Images through Adversarial Training ,下图很直观地说明了这种方法。
结论
主要的思路和方法就是以上这些,论文原文讲得非常详细。总得来说,AR-GCN 很好地在上采样过程中结合了 GAN 的思路,因此对于未见过的数据集有更强的泛化能力,能够生成细节更丰富的结果。并且通过回归坐标残差来提升收敛速度和稳定性,通过渐进式上采样取得更优的效果。