PointNet++ 论文阅读笔记
论文:PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
一、摘要及引言
PointNet 是直接处理点集的开创性工作,其基本思想是学习每个点的空间编码,然后将所有单个点特征聚合为全局点云特征。但 PointNet 只对单个点编码,无法捕获局部特征。因此引入了分层神经网络 PointNet++ ,通过以分层方式处理点集的方法来获取不同尺度下的点集特征。
二、问题陈述
假设 \(\mathcal{X} = (M, d)\) 是一个离散度量空间,其度量继承自欧氏空间 \(\mathbb{R}^n\),其中 \(M \subseteq \mathbb{R}^n\) 是点集,\(d\) 是距离度量。此外,环境欧氏空间中 \(M\) 的密度可能并非处处一致。我们感兴趣的是学习将 \(\mathcal{X}\) 作为输入(连同每个点的附加特征)的集合函数 \(f\) 并产生语义兴趣重新分级 \(\mathcal{X}\) 的信息。和 PointNet 一样,这样的 \(f\) 可以是将标签分配给 \(\mathcal{X}\) 的分类函数,也可以是将标签分配给 \(M\) 的每个成员的分割函数。
三、方法
PointNet 回顾
对于无序点集 \(\{x_1,\dots,x_n\}\) ,定义集合函数 \(f:\mathcal{X}\rightarrow\mathbb{R}\) 将点集映射为向量: \[ f(x_1,\dots,x_n)=\gamma\left( \underset{i=1,\dots,n}{\max}\{h(x_i)\} \right) \] 其中 \(\gamma\) 和 \(h\) 通常为多层感知器。PointNet 论文中已经证明 \(f\) 可以逼近任何一个连续集合函数,且对输入点排列不变。但 PointNet 缺乏捕捉到不同尺度的本地特征的能力。
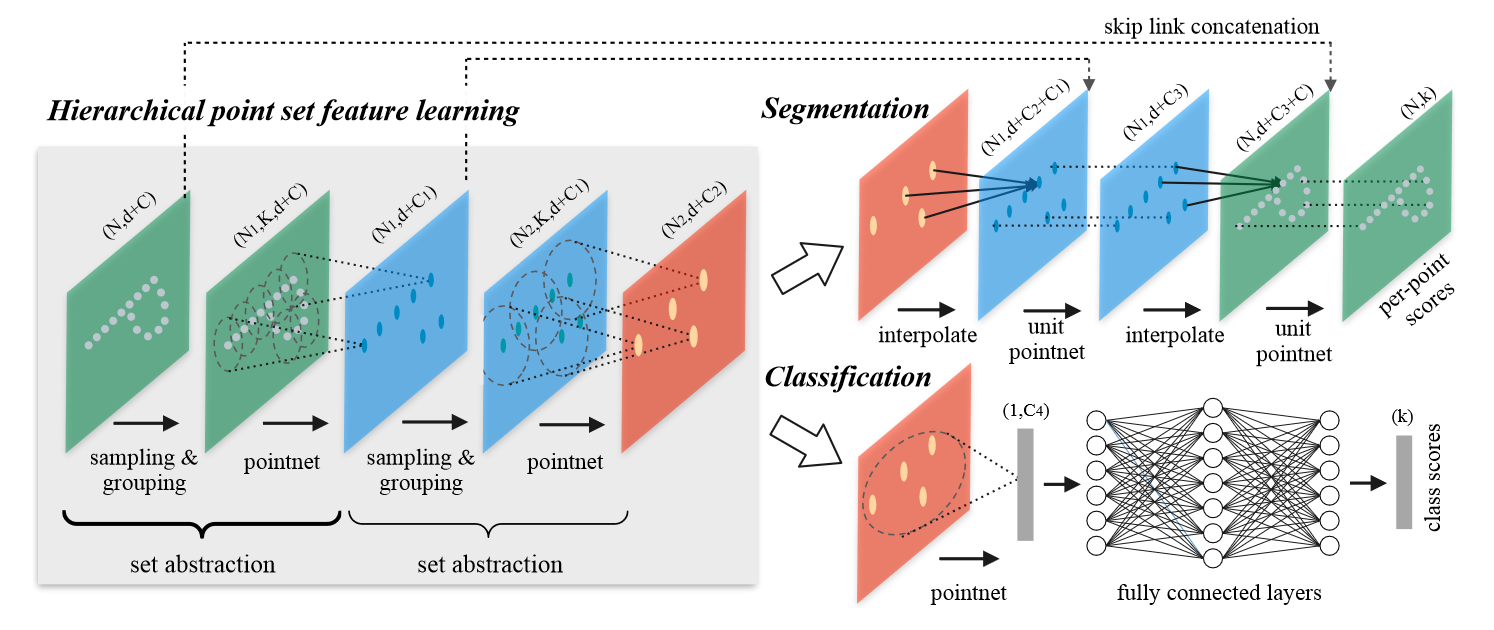
分层点集特征学习
PointNet++ 的层次结构由许多 SA 层(Set Abstraction Levels)组成。SA 层由三个关键层组成:采样(Sampling)层、组合(Grouping)层和 PointNet 层。
抽象层次的输入矩阵大小为 \(N\times(d+C)\) ,表示 \(N\) 个具有 \(d\) 维坐标和 \(C\) 维点特征的点;输出矩阵大小为 \(N'\times(d+C')\) ,表示 \(N'\) 个具有 \(d\) 维坐标和 \(C'\) 维点特征(以总结局部上下文)的子采样点。
采样层
给定输入点 \(\{x_1,x_2,\dots,x_n\}\) ,利用迭代最远点采样(FPS)来选择点的子集 \(\{x_{i_1},x_{i_2},\dots,x_{i_m}\}\) ,使得 \(x_{i_j}\) 是剩余点中距离点集 \(\{x_{i_1},\dots,x_{i_{j-1}}\}\) 最远的点。论文原话虽然凝练但是略微抽象,这里详细阐述一下 FPS 算法的步骤:
- 选定第 \(i\) 个点为初始点,记作 \(x_{i_1}\) ,此时候选集为 \(x_{i_1}\) ;
- 定义点 \(x_k\) 到点集 \(X\) 的距离为 \(\min(\left\|x_k-x \right\|_2)(x\in X)\) ,即到点集中所有点距离的最小值;
- 找到剩余点中距离候选集最远的点,纳入到候选集中;
- 重复步骤 3,直到点数达到设定值。
其中距离的定义一般采用欧式距离,也可以采用测地线距离;初始点随机选择,也可以选择距离点云重心的最远点,使得结果没有随机性。FPS 算法和泊松盘采样很类似,但泊松盘采样提供了更多的随机性,并且对点与点之间的距离要求更宽松。另外,FPS 算法不需要任何参数,应该是更方便可靠的。
采样层得到了 \(N'\) 个采样点,这些点将被用来构成局部特征。
组合层
组合层的输入为 \(N\times(d+C)\) 的点集和 \(N'\times d\) 的采样点集合。对于每个采样点,收集其一定半径范围内最近的 \(K\) 个点(\(K\) 是因采样点而异的),这个操作称为 ball query 。与 KNN 相比,ball query 保证了固定的区域尺度。
每个采样点会生成一个 \(K\times(d+C)\) 的矩阵,因此最后组合得到 \(N'\times K\times(d+C)\) 的矩阵。这个矩阵聚合了一系列的局部点集,如果类比到二维图像,则与 CNN 中的感受野类似,只不过 CNN 中只需要简单地滑动卷积核,而点云中稍微麻烦一些。类似地,PointNet++通过多个 SA 层,逐步扩大感受野,从而提取更高层的特征。
PointNet 层
该层的输入为 \(N'\) 个局部区域,每个 \(K\times(d+C)\) 的局部区域将被聚合为一个 \((d+C')\) 的局部特征向量,组合得到 \(N'\times(d+C')\) 的矩阵。
具体地,首先将局部区域所有点中心化,即 : \[ x_i^{(j)}=x_i^{(j)}-\hat{x}^{(j)},\mathrm{for}\ i=1,2\dots,K\ \mathrm{and}\ j=1,2,\dots,d \] 然后将相对坐标和点特征一起使用,从而捕获局部区域特征,并且消除平移对局部特征的影响。中心化也可以类比到卷积运算中的卷积核中心,因为卷积操作同样不关心每个点在图像中的绝对位置。
非均匀采样密度下的鲁棒特征学习
如前所述,点集在不同区域的密度不均匀是很常见的。这种不均匀性给点集特征学习带来了重大挑战。在密集数据中学习到的特征可能无法推广到稀疏采样区域。同时,为稀疏点云训练的模型可能无法识别细粒度的局部结构。
理想情况下,我们希望尽可能捕获密集采样区域中的细节,但这在稀疏区域无法做到,因为局部特征可能会因采样不足而失效。在这种情况下,我们应该在附近寻找更大尺度的特征。为了实现这一目标,我们提出了密度自适应 PointNet 层(右图),当输入采样密度发生变化时,它可以学习组合来自不同尺度区域的特征。我们将具有密度自适应 PointNet 层的分层网络称为 PointNet++。
对比 分层点集特征学习 章节所描述的 SA 层,PointNet++中每个 SA 层将提取多个尺度的局部特征,并根据点密度将它们组合,论文提出了两种类型的密度自适应层:MSG 和 MRG 。
多尺度组合(Multi-scale Grouping,MSG)
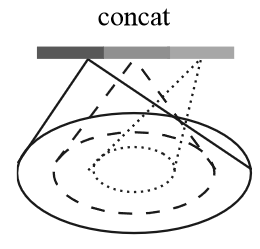 如右图所示,在每个采样点上,用
PointNet
提取不同尺度的特征并将其组合形成多尺度特征。同时为了给网络提供不同密度的输入,采用
random input dropout 方法,随机选取 dropout 概率 \(\theta\in\left[0,p\right] (p\le 1)\)
,以概率 \(\theta\)
丢弃部分输入点,从而提供了稀疏性和不均匀性(随机性)。
如右图所示,在每个采样点上,用
PointNet
提取不同尺度的特征并将其组合形成多尺度特征。同时为了给网络提供不同密度的输入,采用
random input dropout 方法,随机选取 dropout 概率 \(\theta\in\left[0,p\right] (p\le 1)\)
,以概率 \(\theta\)
丢弃部分输入点,从而提供了稀疏性和不均匀性(随机性)。
多分辨率组合(Multi-resolution Grouping,MRG)
 考虑到
MSG
方法计算代价较大,提出一种替代方法:MRG,如图(右)所示。对于每个局部区域的特征
\(L_i\)
,都由两个特征组成:左边特征通过 SA
层得到,右边特征则通过对区域内所有点云利用 PointNet 获取特征(相当于在
SA 层中嵌套了一个 SA 层?)。
考虑到
MSG
方法计算代价较大,提出一种替代方法:MRG,如图(右)所示。对于每个局部区域的特征
\(L_i\)
,都由两个特征组成:左边特征通过 SA
层得到,右边特征则通过对区域内所有点云利用 PointNet 获取特征(相当于在
SA 层中嵌套了一个 SA 层?)。
当局部区域密度较低时,第一个向量往往不如第二个可靠,这时可以提高第二个向量的权重。相反地,局部区域密度较高时,第一个向量提供了更精细的细节特征。
用于点分割的特征传递
SA 层对原始点集进行了下采样,然而在分割任务重我们希望获得所有原始点的点特征(即输入输出矩阵的行数应相等)。一种办法是在每个 SA 层中将所有点都采样为中心点(即去掉了 Sampling 层),但这样会导致计算代价非常大。因此论文给出了另一种方法:特征传播(FP)层(Feature Propagation level)。设 \(N_l\ ,\ N_{l-1}\) 是第 \(l\) 个 SA 层输出和输入的点集大小(\(N_l\le N_{l-1}\)),FP 层通过在 \(N_{l-1}\) 个点的坐标处插入 \(N_l\) 个点的特征值 \(f\) 来实现上采样。具体的插值方法,论文选择了基于 kNN 的反距离加权平均: \[ f^{(j)}(x)=\frac{\sum_{i=1}^kw_i(x)f_i^{(j)}}{\sum_{i=1}^kw_i(x)}\ \ \textrm{where}\ w_i(x)=\frac{1}{d(x,x_j)^p},\ j=1,\dots,C \]
然后将插值得到的特征和来自 SA 层的 \(N_{l-1}\) 个特征连接(skip link)起来,并传递给 unit pointnet 。unit pointnet 论文中没有更多介绍,只说是类似于 \(1\times 1\) 卷积核。由此来看,unit pointnet 应该就是没有池化操作的 pointnet ,因此只是重组了每个点的特征向量,并不会改变点的个数。
重复通过与 SA 层个数相同的 FP 层,即可将输出矩阵行数恢复为 \(N\) ,并且特征长度重组为 \(k\) ,即类别个数,从而达到分割的目的。
四、总结
针对 pointnet 难以获取局部特征的缺陷,pointnet++ 主要做了以下改进:
- 采用多个 SA 层逐步获取多层次的特征信息。其中采样层利用 FPS 算法生成采样点;组合层利用 ball query 算法构成局部区域;pointnet 层提取局部区域特征;
- 采用多个 FP 层进行特征上采样,融合高层特征和底层特征,实现分割任务。利用了反距离加权插值来上采样特征值,利用了 unit pointnet 来提取特征;
- 提出了 MSG 和 MRG 两种方法来应对非均匀采样问题,主要原理是在 SA 层中为采样点生成多尺度的局部信息,并通过 dropout 方法来提供稀疏性和不均匀性。