PointNet 论文阅读笔记
论文:PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
一、摘要
点云是一类重要的几何数据结构。由于其形式不规则,大多数研究人员将其转换为规则的 3D 体素网格或图像集合来处理。然而这会使数据不必要地庞大。该论文设计了一种直接作用于点云数据的新型神经网络 PointNet,它很好地遵从了输入点的排列不变性,并为从对象分类、部分分割到场景语义解析等应用场景提供统一的架构。PointNet 虽然简单,但展现出了很好的效果。
二、相关工作
3D 深度学习方面,在此论文之前有很多形式出现:
- Volumetric CNNs:最早将 3D 卷积神经网络应用于体素化点云,但由于数据稀疏性和 3D 卷积的计算成本,受到分辨率的限制;
- Multiview CNNs:多视图 CNN 将 3D 点云或形状渲染成 2D 图像,然后应用 2D CNN 对其进行分类。然而将这种方法扩展到场景理解过其它 3D 任务并非易事;
- Spectral CNNs:这种卷积网络在网格点云的频率域上进行,但仅适用于具有规则结构的网格,难以应用于更加复杂和不规则的形状;
- Feature-based DNNs:通过提取传统形状特征将 3D 数据转换为向量,再利用全连接网络对形状分类,但受到特征本身表达能力的限制;
这些方法都不能够直接处理无序点集,而是在尝试将点云转换为序列形式,以便用熟悉的卷积网络来操作,但同时面临计算复杂度等问题。
三、问题陈述
定义点云为一组 3D 点 \(\{ P_i|i=1,\dots,n \}\) ,其中 \(P_i\) 是包含 \((x,y,z)\) 和额外特征通道(如颜色、法线等)的向量,在论文中仅适用 \((x,y,z)\) 坐标。对于分类问题,输入点云可能是单体,也可能是从场景中预先分割得到。PointNet++ 为 \(k\) 个候选类别输出 \(k\) 个分数;对于分割问题,任务可能是从单体中分割出不同的结构,也可能是从三维场景中分割出不同的物体。若共有 \(n\) 个点,\(m\) 个类,则输出 \(n\times m\) 个分数,表示每个点属于每个类的概率,从而进行分割。
四、具体方法
\(\mathbb{R} ^n\) 空间中点集的性质
我们的输入是来自欧几里德空间的点的子集。它具有三个主要属性:
- 无序性。与图像中的像素阵列或体积网格中的体素阵列不同,点云是一组没有特定顺序的点。换句话说,一个使用 N 个 3D 点集的网络需要对 N ! 种输入点排列具有不变性;
- 点之间的关联性。这些点来自具有距离度量的空间。这意味着点不是孤立的,相邻的点形成一个有意义的子集。因此,该模型需要能够从附近的点捕获局部结构,以及局部结构之间的组合相互作用;
- 变换下的不变性。作为一个几何对象,点集的学习表示应该对某些变换是不变的,如旋转和平移。
PointNet 架构
网络具有三个关键模块:作为对称函数的最大池化层,用于聚合来自所有点的信息、局部和全局信息组合结构,以及两个对齐输入点和点特征的联合对齐网络。下面的单独段落中将讨论这些设计选择背后的原因。
无序输入的对称函数
为了解决无序性问题,论文给出了三种策略:
- 引入一种规范的排序方式,但稳定的排序方式难以确定,且易受噪声的影响;
- 把点云看作一个序列信号,并通过随机排列的方式训练 RNN 以驱使输出结果相同,但这种方法随着点云数量增长失去可行性;
- 利用对称函数聚合来自每个点的信息。所谓聚合信息,即将 \(n\) 个向量作为输入而产生一个对输入顺序不变的新向量。例如 \(1+2+3 = 2+3 +1\) 。显然这种方法是较为合适的。
定义函数 \(h:\mathbb{R} ^N \rightarrow
\mathbb{R} ^K\) ,用于对每个点进行处理;定义对称函数 $g:_{n} $
,聚合处理结果;则由输入到输出的一般函数 $f:2^{ ^N} $ 定义为:
\[
f(\{x_1,\dots,x_n\}) \approx g(h(x_1),\dots ,h(x_n))
\] 在实践中,论文采用多层感知器(MLP)来近似 \(h\),利用最大池化函数来近似 \(g\) 函数。
本地和全局信息聚合
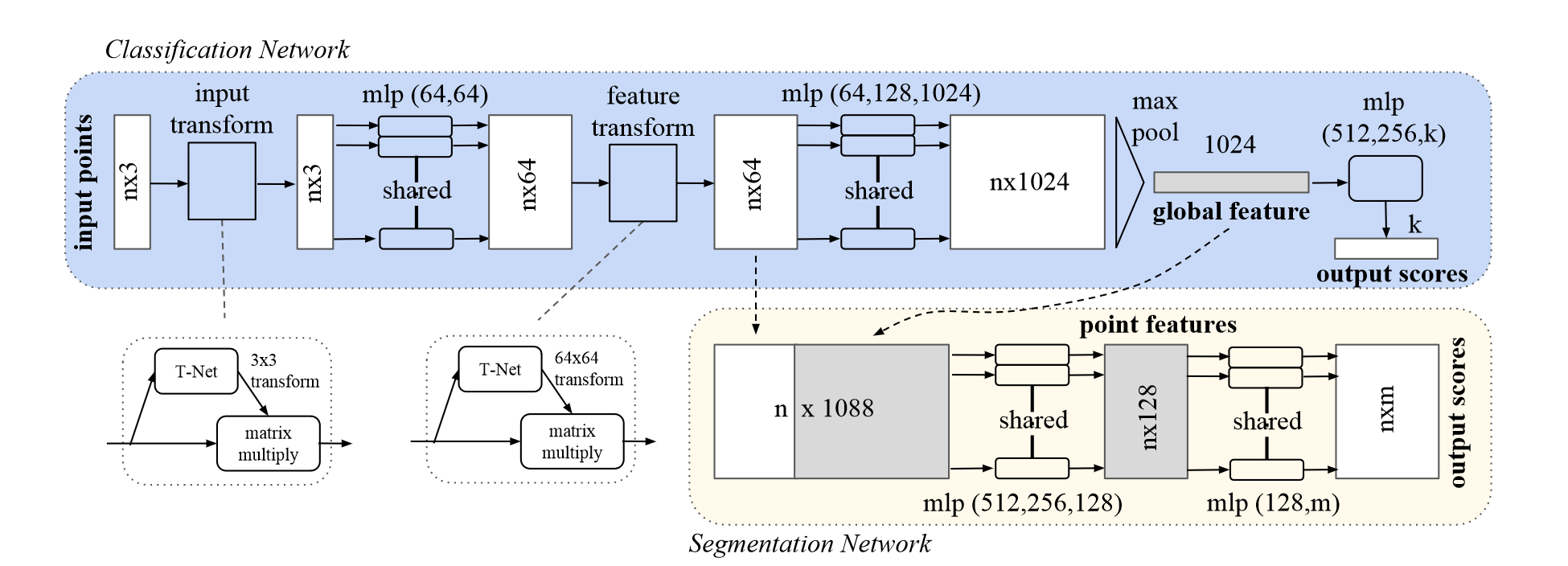
对于分割任务,需要结合本地信息和局部信息。论文采用了简单高效的办法:将学习得到的全局特征和局部特征直接连接在一起,如上图所示。然后再重新提取每个点的特征,从而使得每个点的特征同时包含局部和全局信息。再利用新的组合特征训练几个 MLP ,即可实现每个点的类别判断,也就是分割;若要对单体点云进行识别分类,则直接利用全局特征训练。
联合对齐网络
为了使特征具有旋转平移不变性,论文引入了一种迷你网络 T-net 来直接预测仿射变换矩阵,并将该变换直接应用于原始输入。同样地,特征也需要引入旋转不变性,因此对点特征也可以训练一个对齐网络。
关于 T-net 的结构,其相当于小型的 PointNet,利用最大池化得到全局特征,再利用 MLP 得到 \(3\times 3\) 的转换矩阵。由于特征空间维数较大,增大了优化的难度,因此在 softmax 训练损失的基础上,添加了一个正则化项,用来将特征变换矩阵约束为近似正交矩阵: \[ L_{reg}=\| I-AA^T \|^2_F \] 其中 \(A\) 是由迷你网络预测得到的旋转矩阵。正则项使得优化更稳定,性能更优。
五、总结
为了直接针对点集进行处理,pointnet 的主要思想就是通过池化来解决无序性,通过 MLP 来扩大和缩放特征尺寸。同时为了引入旋转不变性,将点云坐标(或特征)对齐,使用了 T-net 来预测旋转矩阵。